

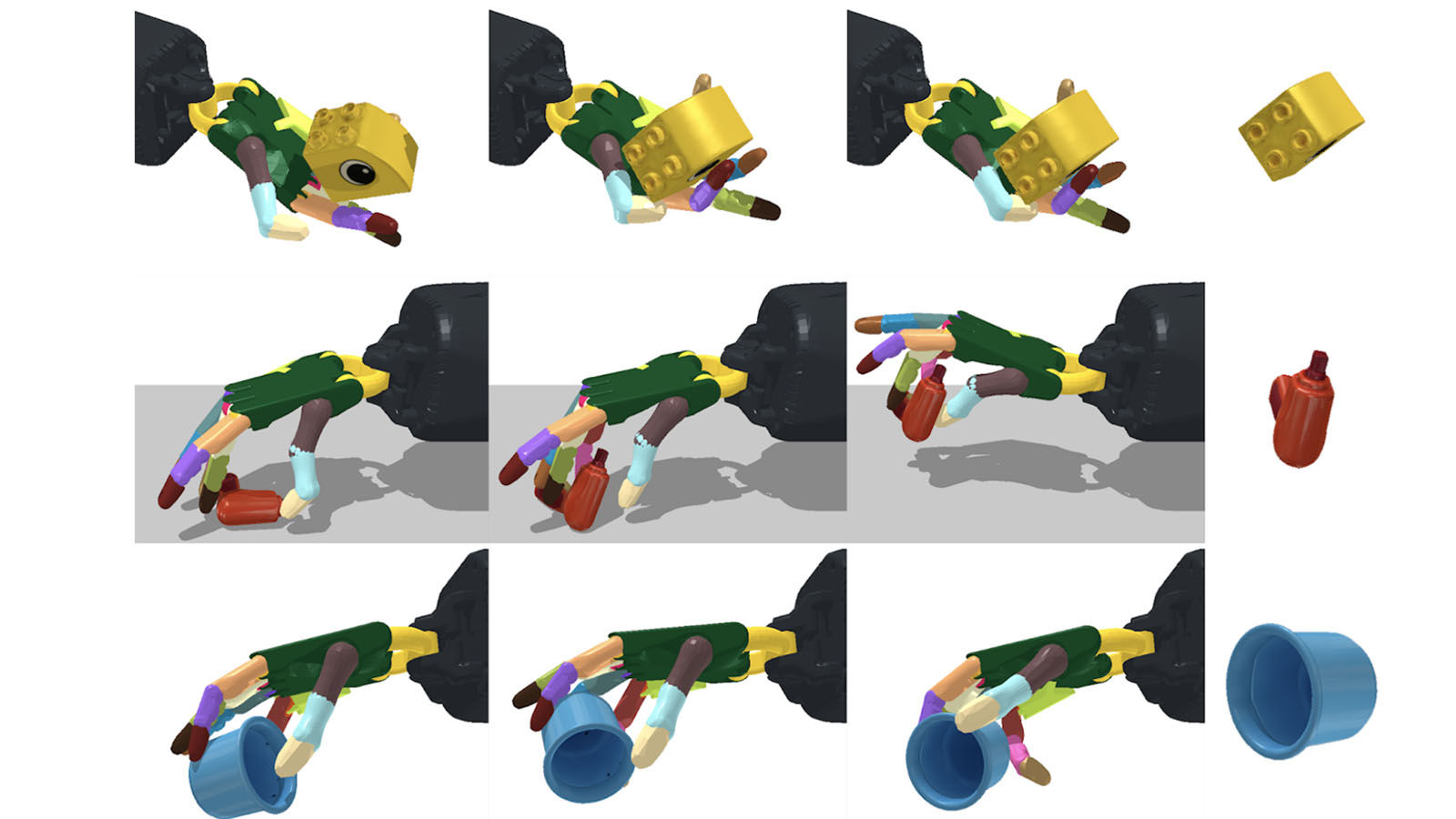
At one year old, a baby is more dexterous than a robot. While machines can perform tasks, they lack natural exploratory and sophisticated manipulation skills. OpenAI’s Dactyl uses a humanoid robot hand to solve a Rubik’s cube, moving towards general AI. DeepMind’s RGB-Stacking system teaches robots to grab and stack items. MIT’s CSAIL developed a framework enabling a robotic hand to reorient over 2,000 objects, enhancing its ability to manipulate various items and generalize to unseen objects. This progress aims to replicate human dexterity in machines.







